
SMILE - PROJECT DESCRIPTION [CLOSED]
The purpose of the SMILE project (SisteMa a pIlotaggio remoto per il supporto all'agricoLtura di precisione) is the development of an automatic reconnaissance system based on Remotely Piloted Aircraft (APR), as support for precision farming methods of interest for farmers and agronomists. The development of this research program involves the design interaction of three fundamental factors:
- the flight system
- the measurement system
- end users
The flight system includes a flight segment and a ground segment for remote control of the system. The flight segment is an APR, known more familiarly as drone.
SMILE - Project objective
The project proposes the development of an automatic recognition system based on Remote Piloted Aircraft, both fixed-wing and rotary-wing (multirotor), as a support to precision farming methods which are of interest to farmers and agricultural researchers.
The development of this research program involves the design interaction of three fundamental factors:
- Flight system;
- Measurement system;
- End users.
SMILE - Technical objectives


The technical objectives set in the SMILE project are:
- design and testing of flight technology (fixed-wing platform with an autonomy of 30-45 minutes and take-off mass of less than 2 kg - multi-rotor platform with an autonomy of 15 minutes and take-off mass of less than 4 kg)
- development of a tele-navigation and data processing station based on tablet (man portable) with real-time rendering of standard video signal and navigation map / flight parameters / alarms
- semi-autonomous and programmable waypoint flight system via risk maps with automatic generation of the overflight grid (minimum energy cost / maximum use of hourly and kilometers autonomy)
- reduced intervention of the human operator in flight operations
- HMI project to support the operator based on cognitive engineering
- evaluation of the benefits deriving from the introduction of systems based on augmented reality
- guidance, navigation and control system developed in-house (integrated sensors and on-board computer)
- choice and functional verification of the on-board sensor (optical and multi-spectral)
- generation of the two-dimensional map obtained from ground measurements (hence the prescriptive map defined in post processing)
- software application development to support in-flight data processing or area map processing (prescription map) geo-referencing software and simple and robust mosaic
SMILE - Chronicle




Project launch date: 01.03.2014
Project conclusion date: 19.09.2016
- 31.05.2014: multi-rotor platform design and testing (8 coaxial rotors): Autonomy: 15 min, Payload: 1.5 kg.
- 18.07.2014: paddy flight test with active multispectral sensor.
- 01.09.2014: ENAC recognition for carrying out non-critical specialized operations pursuant to the ENAC Regulation "Remote Pilot Aircraft".
- 18.09.2014: flight test results: over 90% correlation between vegetation indexes obtained from the measurements of the sensor loaded on the multirotor and the measurements carried out on the ground with the same sensor.
- 15.10.2014: new multirotor version sizing: Autonomy: 20 min, Payload: 2 kg.
- 16.12.2014: quota maintenance test in automatic low level flight.
- 20.12.2014: new multirotor version sizing (Q4-Rotor-Power): Autonomy: 40 min (60 min with 2 battery packs), Payload: 2 kg.
- 30.01.2015: realization Q4-Rotor-Power.
- 12.02.2015: first Q4-Rotor-Power tests. The estimated flight autonomy during the planning phase is confirmed.
- 16.02.2015: fixed wing platform sizing (AGRI-2000): Autonomy: 60 min, Cruising speed: 15 m / s (54 km / h), Payload: 1 kg.
- 31.03.2015: dimensioning of a light multirotor (Q4-Rotor-Light). MTOM: 1.8 kg, Autonomy: 15 min, Payload: 0.3 kg.
- 24.04.2015: flight test (Q4-Rotor-Power) on barley field with active multispectral sensor.
- 11.05.2015: implementation of AGRI-2000.
- 22.05.2015: Q4-Rotor-Light test.
- 09.07.2015: surveys (Q4-Rotor-Power) at Enti Risi - Castello d'Agogna (VC) on rice parcels with active multispectral sensor. At the end of the surveys, a manual survey was performed on the plot with a portable sensor and samples of the culture were taken to validate the measurements made.
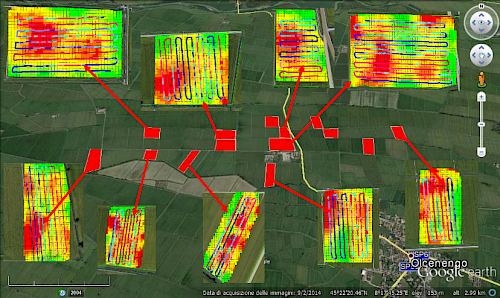
- 11.07.2015: surveys (Q4-Rotor-Power) at the Palestro estate - Olcenengo (VC). Over 20 ha of rice parcels have been detected.
- 11.09.2015: first test flight AGRI-2000.
- 09.30.2015: optimization of the light multirotor (Q4-Rotor-Light-V2). Autonomy: 20 min, Payload 0.3 kg, MTOM = 1.8 kg.
- 10.15.2015: realization of the Q4-Rotor-Light-V2.
- 11.21.2015: flight test with passive sensor on hazel grove (Cravanzana - CN).
- 23.04.2016: flight test with passive sensor on apple orchard at Castel Fragsburg - Merano (BZ).
- 05/28/2016: survey with passive sensor on apple orchard at Laimburg Research Center, Vadena (BZ).
- 01.07.2016: survey with passive sensor on apple orchard at Laimburg Research Center, Vadena (BZ).
- 05.07.2016: survey with active sensor on paddy at the Varalda - Olcenengo farm (VC). 22 ha were detected. The data obtained were used to calculate the fertilization doses to be applied to each plot of the farm.
- 07.07.2016 and 08.07.2016: surveys with active sensor on paddy at the Palestro estate - Olcenengo (VC). Over 180 hectares have been found. The data obtained were used to calculate the fertilization doses to be applied to each plot of the farm.
- 18.07.2016: surveys with active sensor on paddy at the Carrà estate - Olcenengo (VC). 30 ha were detected. The data obtained were used to calculate the fertilization doses to be applied to each plot of the farm.
- 19.07.2016: surveys with passive sensor on the vineyard (Tenuta Cannona, Carpeneto - AL).
- 19.07.2016: surveys with passive sensor on the vineyard (Azienda agricola La Piria, Rocca Grimalda - AL).
- 19.07.2016: surveys with passive sensor on the vineyard (Agriturismo La Bella Vite, Carpeneto - AL).
- 16.08.2016: measurements with passive sensor on corn (Santhià - VC).
- 19.09.2016: Closing of the SMILE project.