
SMILE - Descrizione Progetto [CLOSED]
La finalità del progetto SMILE (SisteMa a pIlotaggio remoto per il supporto all'agricoLtura di precisionE) è lo sviluppo di un sistema di ricognizione automatico basato su Aeromobili a Pilotaggio Remoto (APR), quale supporto ai metodi dell’agricoltura di precisione, di interesse per agricoltori e ricercatori agronomi. Lo sviluppo di questo programma di ricerca prevede l’interazione progettuale di tre fattori fondamentali:
- il sistema di volo
- il sistema di misura
- gli utenti finali
Il sistema di volo include un segmento di volo e un segmento di terra per il controllo remoto del sistema. Il segmento di volo è un APR, noto più familiarmente come drone.
SMILE - Scopo del progetto
Il progetto si propone lo sviluppo di un sistema di ricognizione automatico basato su Aeromobili a Pilotaggio Remoto, sia ad ala fissa, sia ad ala rotante (multirotore), quale supporto ai metodi dell'agricoltura di precisione, di interesse per agricoltori e ricercatori agronomi.
Lo sviluppo di questo programma di ricerca prevede l'interazione progettuale di tre fattori fondamentali:
- Sistema di volo;
- Sistema di misura;
- Utenti finali.
SMILE - Obiettivi tecnici


Gli obiettivi tecnici preposti nel progetto SMILE sono:
- progetto e collaudo della tecnologia di volo (piattaforma ad ala fissa con autonomia di 30-45 minuti e massa al decollo inferiore ai 2 kg - piattaforma multi-rotorica con autonomia di 15 minuti e massa al decollo inferiore ai 4 kg)
- sviluppo di una stazione di tele-navigazione e elaborazione dati basata su tablet (man portable) con resa in tempo reale di segnale video standard e mappa di navigazione / parametri di volo / allarmi
- sistema di volo portatile semi-autonomo e programmabile per waypoint tramite mappe di rischio con generazione automatica della griglia di sorvolo (minimo costo energetico / massimo sfruttamento dell'autonomia oraria e chilometrica)
- ridotto intervento dell'operatore umano nelle operazioni di volo
- progetto HMI a supporto dell'operatore basati sull'ingegneria cognitiva
- valutazione dei benefici derivanti dall'introduzione di sistemi basati su realtà aumentata
- sistema di guida, navigazione e controllo sviluppato internamente all'azienda (sensori e computer di bordo integrati)
- scelta e verifica funzionale del sensore imbarcato (ottico e multi-spettrale)
- generazione della mappa bi-dimensionale ottenuta da misure a terra (da cui la mappa prescrittiva definita in post processing)
- sviluppo delle applicazioni software a supporto dell'elaborazione dei dati acquisiti in volo ovvero elaborazione della mappa area (mappa di prescrizione) software di geo-referenziazione e mosaicatura semplice e robusto
SMILE - Cronistoria




Data di avvio del progetto: 01.03.2014
Data di conclusione del progetto: 19.09.2016
- 31.05.2014: progetto e collaudo piattaforma multi-rotorica (8 rotori coassiali): Autonomia: 15 min, Payload: 1.5 kg.
- 18.07.2014: test di volo in risaia con sensore multispettrale attivo.
- 01.09.2014: riconoscimento ENAC per lo svolgimento di operazioni specializzate non-critiche ai sensi del Regolamento ENAC "Mezzi Aerei a Pilotaggio Remoto".
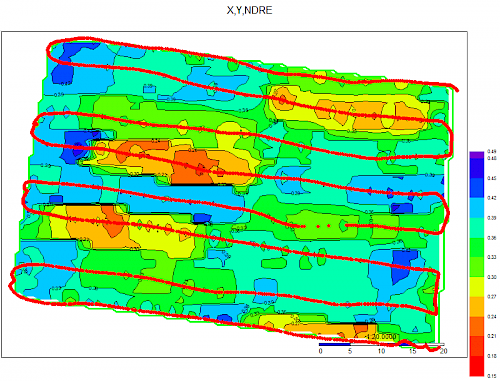
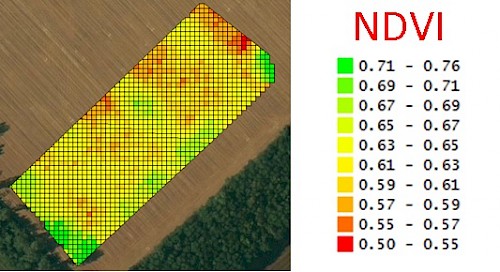
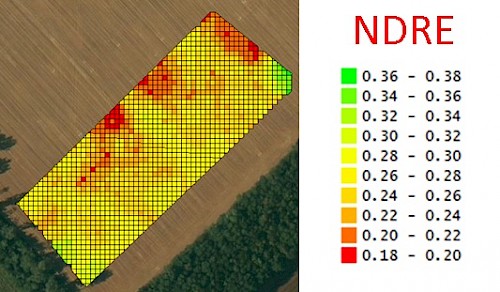
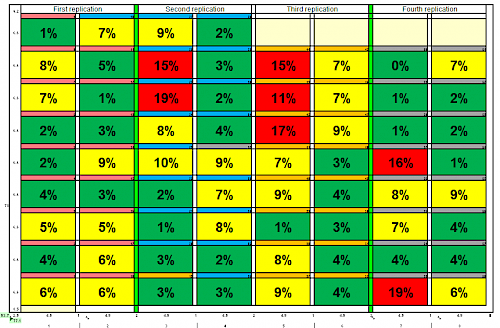
- 18.09.2014: risultati test di volo: oltre il 90% di correlazione tra gli indici di vegetazione ricavati dalle misure del sensore imbarcato sul multirotore e le misure effettuate a terra con il medesimo sensore.
- 15.10.2014: dimensionamento nuova versione del multirotore: Autonomia: 20 min, Payload: 2 kg.
- 16.12.2014: test mantenimento di quota in volo radente automatico.
- 20.12.2014: dimensionamento nuova versione del multirotore (Q4-Rotor-Power): Autonomia: 40 min (60 min con 2 pacchi batterie), Payload: 2 kg.
- 30.01.2015: realizzazione Q4-Rotor-Power.
- 12.02.2015: primi collaudi Q4-Rotor-Power. Viene confermata l'autonomia di volo stimata in fase di progettazione.
- 16.02.2015: dimensionamento piattaforma ad ala fissa (AGRI-2000): Autonomia: 60 min, Velocità di crociera: 15 m/s (54 km/h), Payload: 1 kg.
- 31.03.2015: dimensionamento di un multirotore leggero (Q4-Rotor-Light). MTOM: 1.8 kg, Autonomia: 15 min, Payload: 0.3 kg.
- 24.04.2015: test di volo (Q4-Rotor-Power) su campo di orzo con sensore multispettrale attivo.
- 11.05.2015: realizzazione AGRI-2000.
- 22.05.2015: collaudo Q4-Rotor-Light.
- 09.07.2015: rilievi (Q4-Rotor-Power) presso Ente Risi - Castello d'Agogna (VC) su parcelle di riso con sensore multispettrale attivo. Al termine dei rilievi è stato eseguito un rilievo manuale sulla parcella con un sensore portatile e sono stati prelevati dei campioni della coltura per validare le misurazioni effettuate.
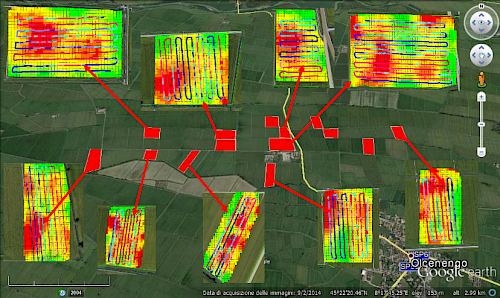
- 11.07.2015: rilievi (Q4-Rotor-Power) presso la tenuta Palestro - Olcenengo (VC). Sono stati rilevati oltre 20 ha di parcelle di riso.
- 11.09.2015: primo volo di collaudo AGRI-2000.
- 30.09.2015: ottimizzazione del multirotore leggero (Q4-Rotor-Light-V2). Autonomia: 20 min, Payload 0.3 kg, MTOM = 1.8 kg.
- 15.10.2015: realizzazione del Q4-Rotor-Light-V2.
- 21.11.2015: test di volo con sensore passivo su noccioleto (Cravanzana - CN).
- 23.04.2016: test di volo con sensore passivo su meleto presso Castel Fragsburg - Merano (BZ).
- 28.05.2016: rilievo con sensore passivo su meleto presso Centro di ricerca Laimburg, Vadena (BZ).
- 01.07.2016: rilievo con sensore passivo su meleto presso Centro di ricerca Laimburg, Vadena (BZ).
- 05.07.2016: rilievo con sensore attivo su risaia presso azienda agricola Varalda - Olcenengo (VC). Sono stati rilevati 22 ha. I dati ottenuti sono stati utilizzati per calcolare le dosi di concimazione da applicare a ciascun appezzamento dell'azienda agricola.
- 07.07.2016 e 08.07.2016: rilievi con sensore attivo su risaia presso tenuta Palestro - Olcenengo (VC). Sono stati rilevati oltre 180 ettari. I dati ottenuti sono stati utilizzati per calcolare le dosi di concimazione da applicare a ciascun appezzamento dell'azienda agricola.
- 18.07.2016: rilievi con sensore attivo su risaia presso tenuta Carrà - Olcenengo (VC). Sono stati rilevati 30 ha. I dati ottenuti sono stati utilizzati per calcolare le dosi di concimazione da applicare a ciascun appezzamento dell'azienda agricola.
- 19.07.2016: rilievi con sensore passivo su vigneto (Tenuta Cannona, Carpeneto - AL).
- 19.07.2016: rilievi con sensore passivo su vigneto (Azienda agricola La Piria, Rocca Grimalda - AL).
- 19.07.2016: rilievi con sensore passivo su vigneto (Agriturismo La Bella Vite, Carpeneto - AL).
- 16.08.2016: rilievi con sensore passivo su mais (Santhià - VC).
- 19.09.2016: Chiusura progetto SMILE.