Search and Rescue Demonstration – Geoparc Bletterbach (BZ), Italy
INTRODUCTION
The present blog describes the flight activities carried out on the 6th August 2020, in Geoparc Bletterbach, Aldino (BZ), to simulate a search and rescue mission with drones in alpine environment.
The flight activities were carried out on behalf of the EURAC Research Centre, Centre for Sensing Solution. This exercise was perfomed within the Interreg project S.T.A.R.T. (ITAT3023) and it involves also EURAC Institute of Mountain Emergency Medicine and Corpo Nazionale di Soccorso Alpino e Speleologico (CNSAS) of South Tyrol.
The consultancy service consists of:
- Use of a drone for search and rescue purposes
- Registration of drone flight logs
- Acquisition of images and videos during the flight phases
The following equipment has been used to carry out the consultancy service:
- Mavtech Q4T Drone
- Video-camera with 10x optical zoom
- Navigation camera & Payload release system
- Payload Control System (PCS)
Overview of the flights
Flight Scenario
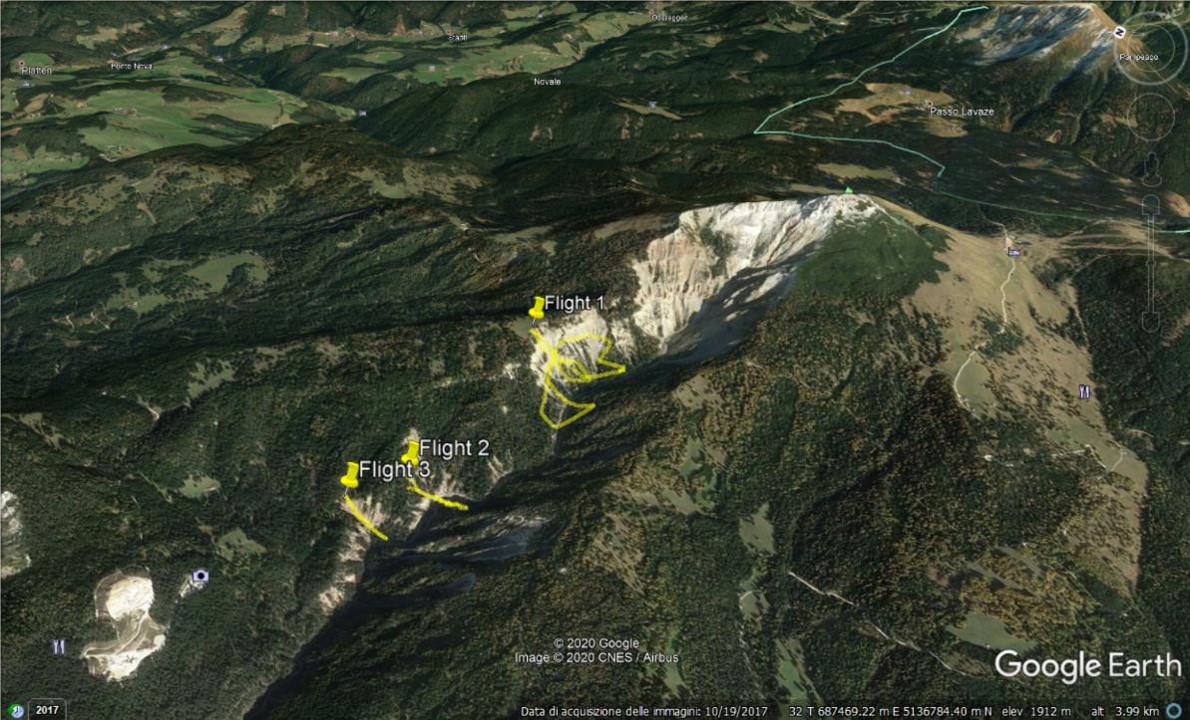
The flight operation has been carried out in the Geoparc Bletterbach, located in Aldino (BZ). The park has an extension of about 200 hectares and is located at an altitude between 1500 and 2000 meters.
Three different take-off and landing spots has been defined, accordingly to EURAC and CNSAS operators.
These areas will be the starting points for the search and rescue missions.
Flight Equipment
The drone used for the reconnaisance missions is the MAVTech Q4T.
The drone has been designed by the company for different applications, such as photogrammetry, surveillance missions, search and rescue and for flight activities that requires a reliable and precise navigation, also in extreme conditions such as the alpine environment.
MAVTech Q4T drone is authorized to perform non-critical specialized operation and critical specialized operation, accordingly to standard scenarios S03, S05, S07.
Two RPAS, based on the Q4T, has been prepared for the consulting service:
- drone for Search
- drone for Rescue

Search Drone
The MAVTech Q4T in Search configuration has the following main features:
- Take-Off Mass (TOM): 4.5 kg
- Endurance: 20 min
- Payload: HD 10x zooming camera
A video camera is installed onboard to accomplish the search purposes. The camera is the Yangda Sky Eye-I (figure below) and it consists of an optical 10x zooming camera with a 3-axis high performance stabilized gimbal. This payload has a quick-release mechanism to install it rapidly on the drone.
Yangda Sky Eye-I main features:
- Video resolution: Full HD (1080P)
- Images resolution: 4MP
- Optical zoom: 10x

The camera is controlled by the MAVTech Payload Control System (MAV-PCS). It houses a 13.3” FullHD capacitive touch-screen, a Windows miniPC and joysticks, and sliders to control pan, tilt and zoom, with other auxiliary functions of the payload. A second operator, different from the remote pilot (PIC, Pilot In Command), controls the PCS and visualize the images on the screen.
MAV-PCS has an integrated Lipo battery, that provides 5 hours of battery life. It can also be connected to a 220 V power supply to charge the internal battery. The case is rugged and certified IP67 and STANAG 4280: it resists to dust, water and light shocks.

Rescue Drone

A second RPAS, also based on the Q4T, has been prepared to transport and release a payload that contains first aid materials and a walkie talkie.
The drone houses an FPV navigation camera that transmits the video to the remote pilot.
The camera has a wide field of view (160 °) and the video resolution is 4K @ 30 fps.
A servomechanism is installed onboard to release the payload, which is commanded by the remote pilot once the release area has been reached.
The medical equipment box is delivered through the use of a little parachute.
Operations Characteristics
During the searching phase of the missing person, the remote pilot flies the drone in the searching area, guided by the PCS operator that provides the pilot the direction to follow. No automatic missions have been considered for this phase.
Before each flight mission, the drone is prepared by the remote pilot and its assistant. This phase consists of the installation of landing gear, propellers, and video camera with the quick release mechanism. Mandatory pre-flight checks are carried out to verify the system integrity of the main components, such as propellers, landing gear, booms, and payload.
Once completed the pre-flight checklist, the RPAS is positioned in the landing spot, the remote controller is switched on and finally, the main battery of the drone is plugged in.
The pilot verifies that the conditions are safe to fly and then arms the vehicle and initiates the take-off. The flight mission consists of a manual survey of the area, while the PCS operator provides information and recommendation to the PIC regarding flight direction and/or possible stops in hovering to perform a more accurate search in a specific area.

The objective of these flight activities is also to assess the maximum coverage in terms of the area scanned by the drone of the three selected viewpoints. During the flight, the PIC verifies its capability to control the vehicle in VLOS (Visual Line of Sight). Once reached the maximum distance, he communicates to the observer the achievement of the farthest distance.
The maximum distance is determined by the experience of Ing. Fabio Benedetto, that can evaluate the feasibility and the safety of the flights, thanks to its long-serving experience in RPAS piloting. This distance will be verified after the flights by analyzing the flight logs.
Once completed the mission, the pilot returns the drone to the starting point, then lands and disarm the vehicle.
The flight is completed and the drone is disassembled and placed in its transport case.
Flights
The flight missions have been performed, each one starting from the designated take-off and landing viewpoints.
The first flight took place in the high part of the canyon, near the waterfall. The second and third flight has been completed in the middle portion of Geoparc Bletterbach, close to “Butterloch”. The following paragraphs describe more in detail the flight missions.
Flight 1
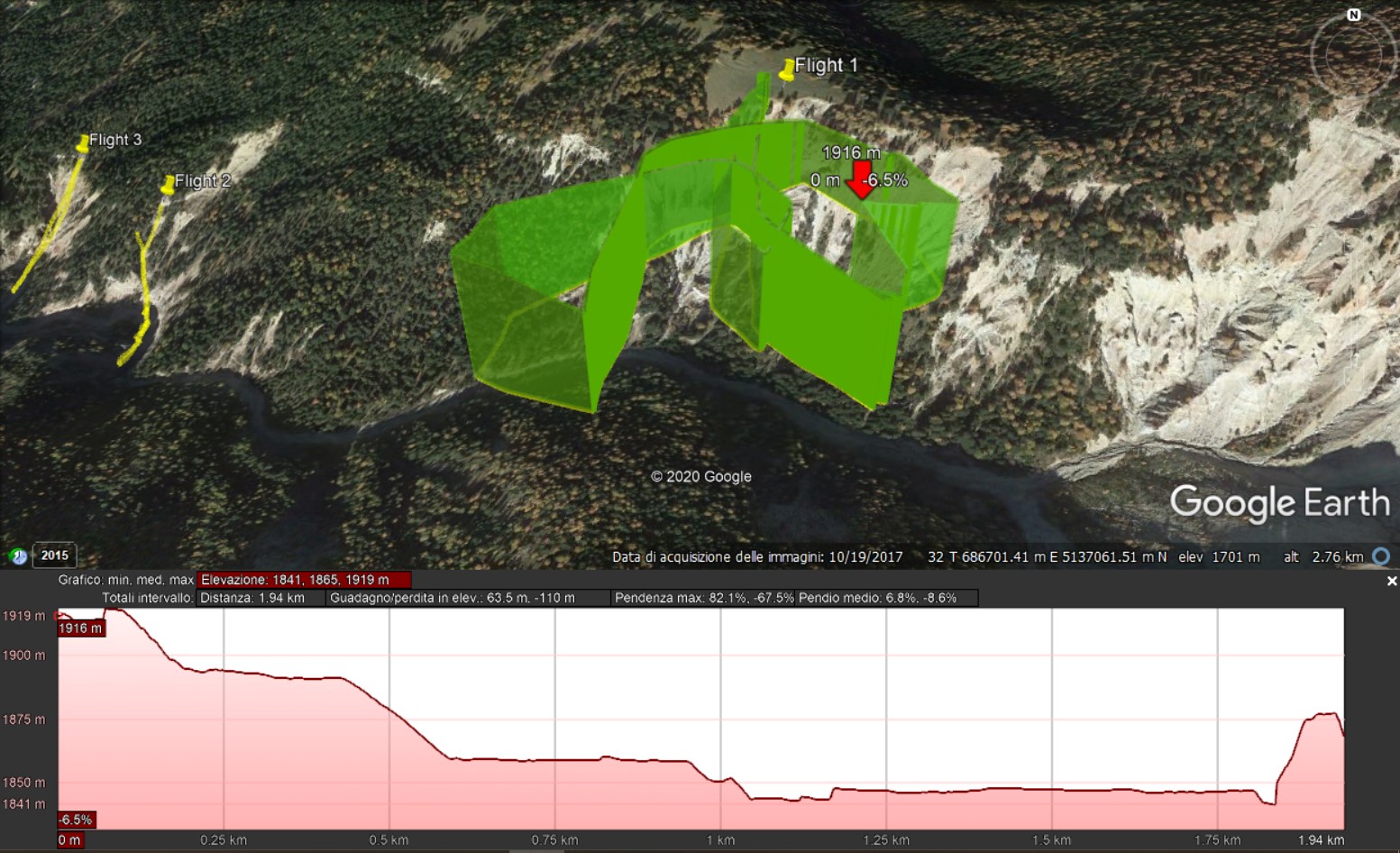
The first flight has been carried out in the upper part of the canyon, close to the waterfall. Take-off and landing were completed at the top of the rock wall on the left side in the figure below.
During the mission, the pilot flew over the entire area, without lowering the aircraft into the gorge. This was necessary because in the lower part there was a high presence of tall plants, which could have obstructed the visibility between the pilot and the aircraft, increasing the risk of the flight mission.
Nevertheless, through the Payload Control System, the ground operator was able to observe the entire area of interest with precision, evaluating in real-time the actual visibility from that altitude.

The flight mission has been characterized by a descent of about 50 m respect to the take-off spot. The figure below shows the altitude profile of the mission.
Take-off took place at 1900 m, while during the searching phase the drone descended to an altitude of about 1850 m.
The flight mission time has been of 22 minutes.
Flight 2
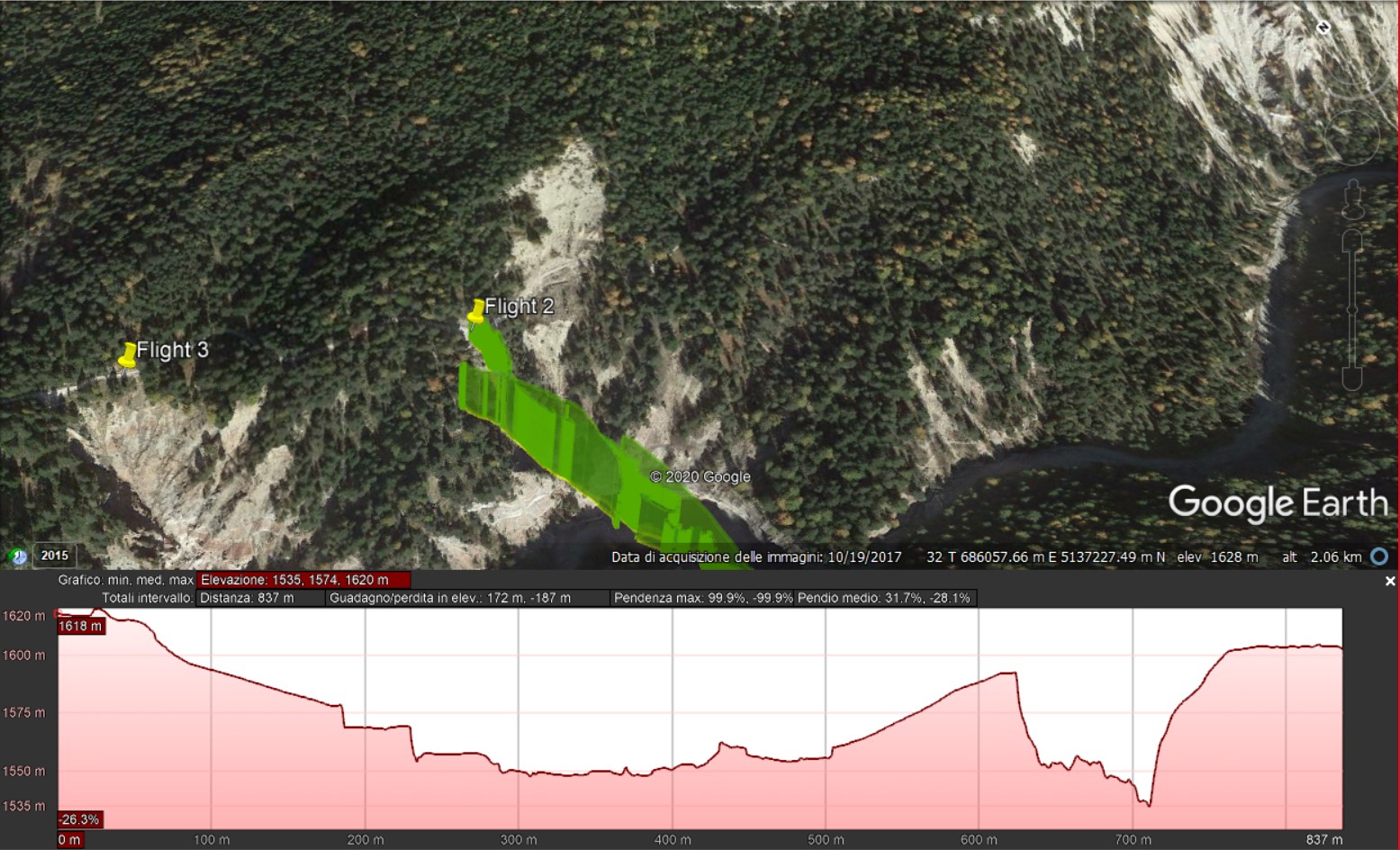
The second flight took place in the nearby of “Butterloch”.
The take-off has been performed in the upper viewpoint, while the landing has been completed in a lower spot. This was decided by the pilot to guarantee the visibility in Line Of Sight of the aircraft and to be able to reach further observation points for the evaluation of the flight quality in remote locations.

The take-off altitude was of 1620 m and during the searching phase of the mission the drone descended to a minimum altitude of 1535 m (see altitude profile in the figure below).
The drone has reached the other side of the canyon to better observe the opposite side of the area and then has come back to the landing spot.
The flight mission lasted 21 minutes.
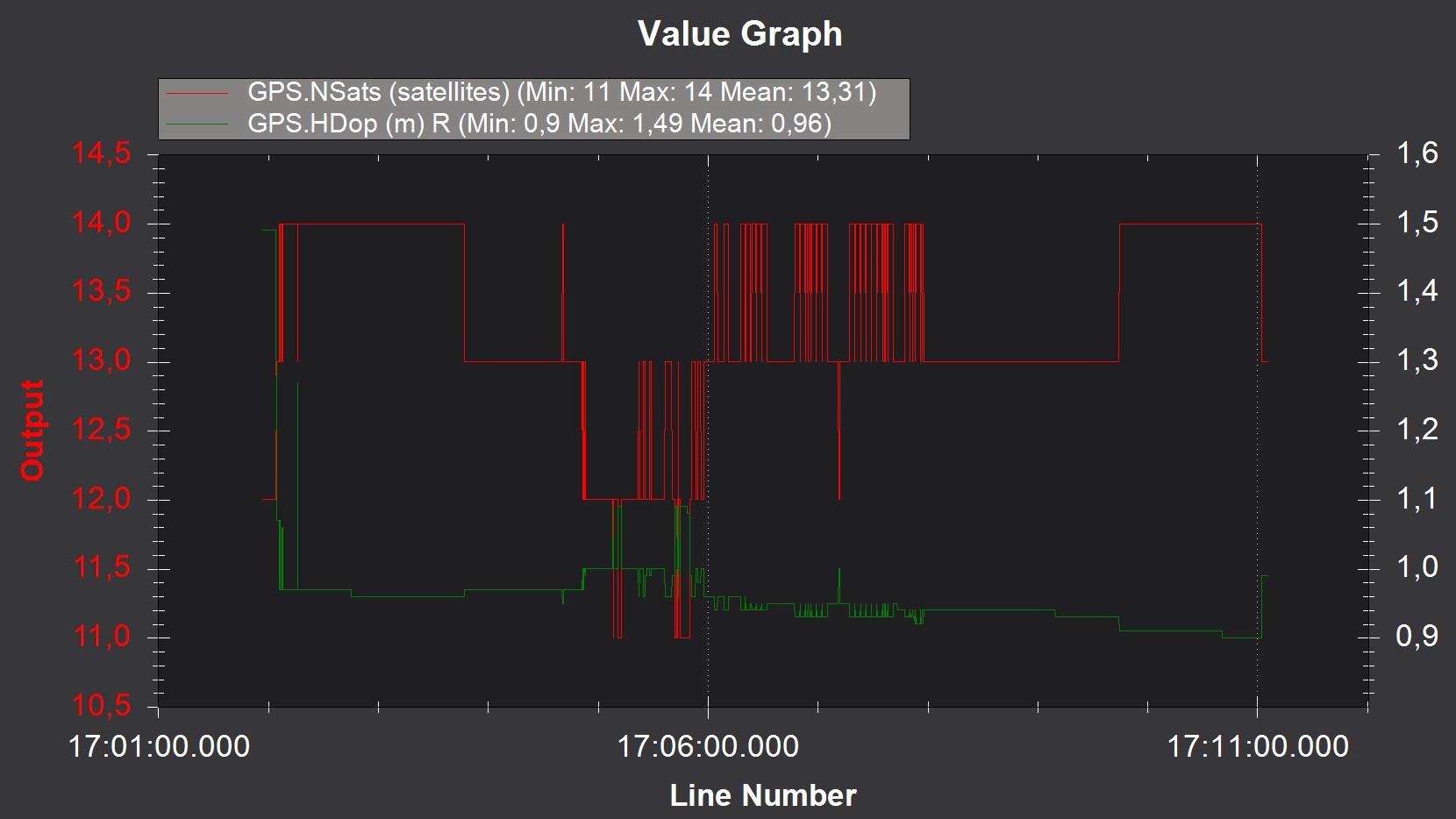
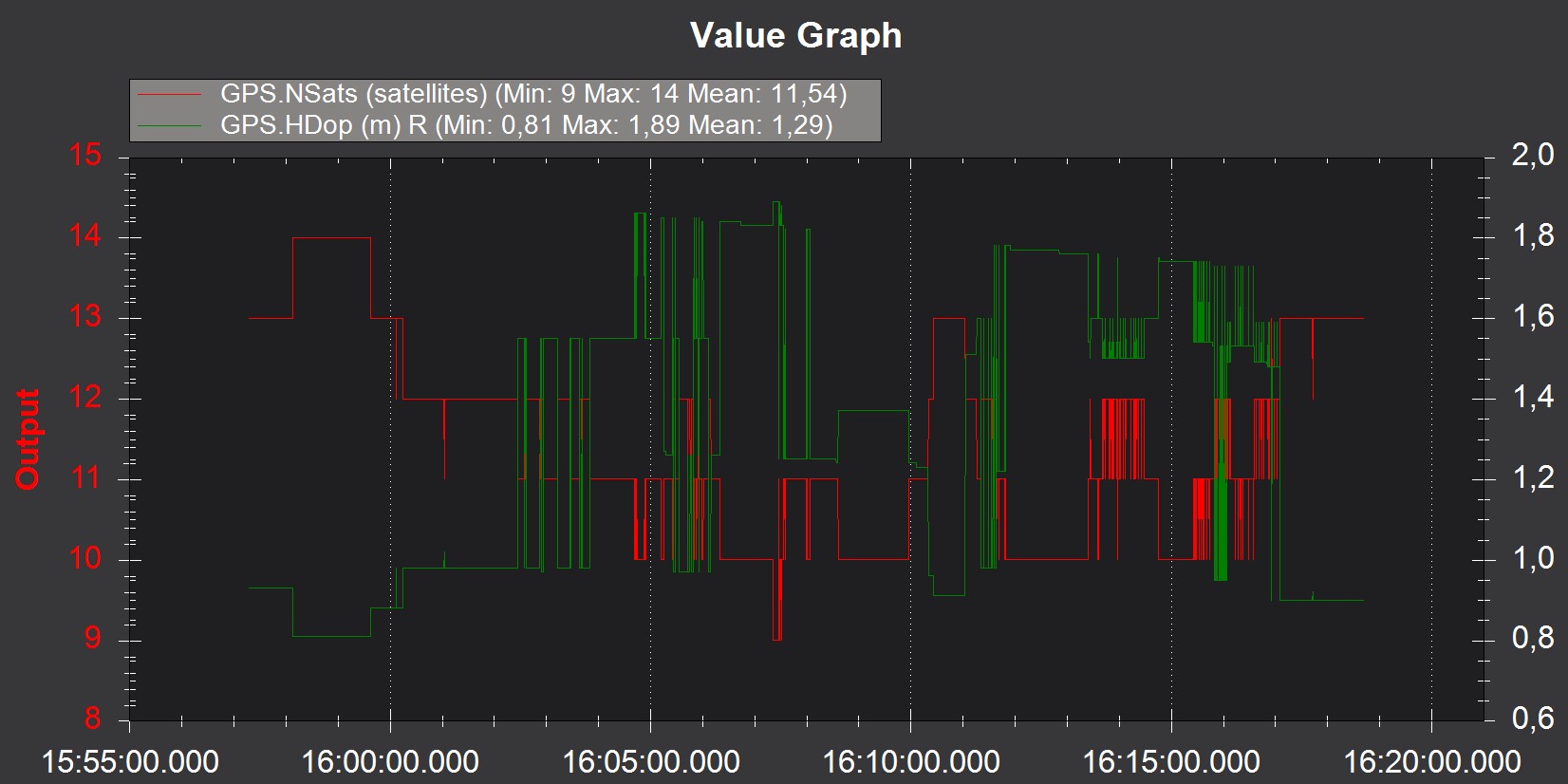
Due to the large presence of very high trees, the GPS signal reception for the positioning of the vehicle must be evaluated for the entire duration of the flight.
In fact, the number of satellites has varied between 9 and 14, sufficient but not optimal values.
Consequently, for the causes just mentioned, the value of the “Horizontal Dilution of precision" (HDop) parameter remained higher than 1 for most of the mission. This value represents in a certain way the uncertainty of horizontal positioning, which the lower it is, the more the uncertainty will be low and consequently, the positioning will be affected by a lower error.
In this case, the HDop values are always good, although they often remain above the optimal value "1". However, these observations must be weighed against the operating environment. In fact, a priori, observing the morphology of the flight area, it was expected to obtain a much higher HDop, causing a greater uncertainty in the GPS positioning of the aircraft. The number of satellites and the HDop values are represented in the graph of the underlying figure, wherein red the number of satellites is represented and in green the value of HDop during the entire flight mission. The range of values for the satellite number is shown on the left of the chart and the range of values for the HDop is shown on the right axis.
Flight 3
The third flight, similarly to the second one, has been performed in the nearby of the “Butterloch”. The take-off and landing area were located at the viewpoint near the placeholder "Flight 3" in the below figure.

According to underlying figure, the take-off has been executed at an altitude of 1582 m. During the exploration phase, the drone descended for 90 m to an altitude of 1492 m.

Despite the deep descent inside the canyon at about 90 meters of altitude gap (about 20-30 meters estimated with respect to the terrain), the quality of the GPS signal has always been excellent, with a number of satellites between 11 and 14 and a HDop value almost always lower than 1 (see the figure below).
In this case, given the geomorphology of the flight area, the very low uncertainty in the GPS positioning of the aircraft is surprising. This, together with the experience of the pilot and the perfect piloting visibility, allowed the descent into the canyon and the approach to the area of interest without any difficulty.
In the same way, retracing the road backward, it was possible to climb and return to the take-off/landing point at the end of the mission comfortably.
The flight mission time has been of 10 minutes.