
AMPLIF-AI
The main purpose of the AMPLIF-AI (Adaptive Mission Planning for LIve inFrAstructures Inspection) project is to monitor numerous infrastructures of the territory of South Tyrol to ensure their operability, efficiency and safety for the community. The system based on artificial intelligence that will enable inspection teams to assess the condition of infrastructures in real time in various application cases in the Alpine context. The partners will develop a system consisting of a ground platform and unmanned aerial vehicles (UAVs) supervised by the inspection team.
Click here to read more!
LEAFLET2.0
The LEAFLET 2.0 project aims to develop a methodology and a service to support professional operators in assessing the health and structural stability of public green areas, through the integration of data acquired by means of low-cost UAS (Unmanned Aerial System) platforms, WebGIS tools and through the use of Artificial Intelligence (AI)-based techniques.
The project is funded by the Autonomous Province of Bolzano through the measure Agevolazioni Innovazione - Progetti di ricerca industriale oppure di sviluppo sperimentale.
Click here to read more!
INDOOR

INDOOR Project (usINg Drones fOr Organ tRansportation) has been developed thanks to the collaboration with various partners, in particular; Università degli studi di Torino, Politecnico di Torino, Centro Regionale Trapianti, Fondazione DOT Onlus, Azienda Ospedaliera Universitaria Città della Salute e delle Scienze di Torino and PROS3 company.
The aim of this project is to set up a series of experiments for the use of Remotely Piloted Aircraft Systems in the field of transplantation medicine, with a view to envisaging scenarios that combine greater effectiveness and cost reduction. The project will allow the study, development and implementation of a vision for the future of the transport of medical equipment, with a focus on transplant medicine.
droneONtrap
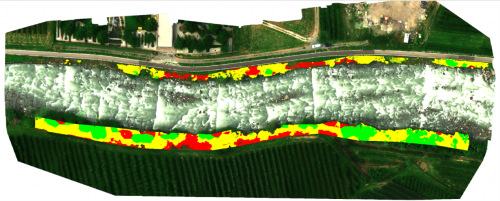
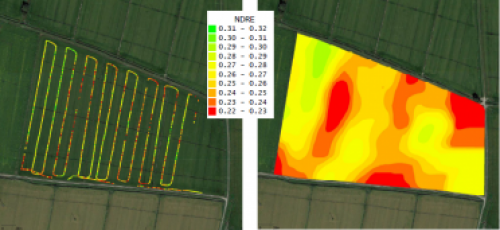
The "droneONtrap" project, in collaboration with company Gruppo FOS, foresees the creation of a system capable of reducing the use of chemical substances in the agri-food, forestry and environmental fields through the application in synergy of data provided by insect traps and multispectral surveys using drones, the latter specifically developed by MAVTech. The system will allow to evaluate in real time the health status of plants, allowing the development of high precision predictive models to help growers to make crucial decisions in critical stages of crops.
The project is funded by the European programme "DIVA" which aims to support the emergence and development of new digitech value chains for the agri-food, forestry and environmental sectors.
droneONtrap was the only Italian project to be awarded funding in the "2nd Call DIVA FUNDED PROJECTS - Demonstration". [CLOSED]
Click here to read more!
BLUESLEMON
The “BT Beacon and Unmanned Aerial System technologies for Landslide Monitoring” project foresees the creation of a low-cost automatic system for monitoring landslide surface displacement, through the integration of Bluetooth (BT) Beacons localization and UAS also named Remotely Piloted Aircraft System (RPAS) technologies. Two subsystems will assemble the final setup: the ground sensors technology and the periodic localization system composed by UAV and beacon reader. The objective of the project is to increase the ability to prevent landslide damage by monitoring ubiquitous and pervasive of landslide areas.
Click here to read more!
WEQUAL
The WEQUAL (WEb Service Center for multidimensional QUALITY design and teleoperated Green Infrastructures monitoring) project provides for the implementation of an integrated environmental assessment system, based on ICT infrastructures and innovative systems for detecting / monitoring watercourses, for the design of fluvial works with a low environmental impact. This system aims to support the decisions of the designers in the design / construction phase of the work and of the technicians of the public administrations in the phases of monitoring and planning of the interventions. [CLOSED]
Click here to read more!
SASNET
SasNet: SAprSwarmNetwork. The project intends to develop, prototype and test a system of RPA (Remote Piloted Aircraft) to use in swarm (Swarm) integrated into a mesh wi-fi network, in order to operate in the Alpine context in case of critical experiences - the tourist population along cycle paths, mountain, lakes etc ..- risk or emergency. The integration of mobile and fixed solar-powered charging and stationing pads is planned. [CLOSED]
Click here to read more!
S-APR 2
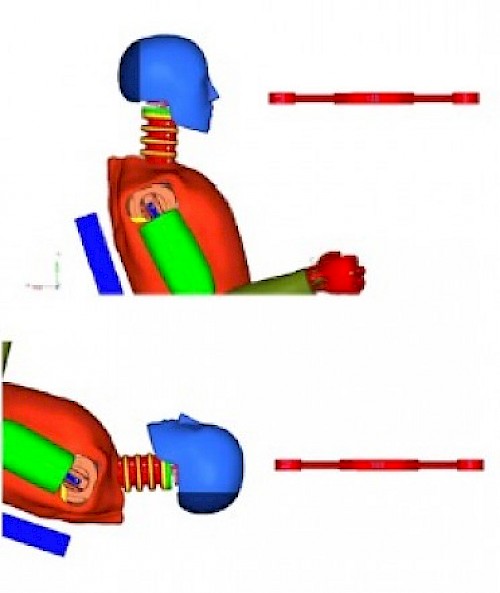
Considering the final results of the SAPR project, it has emerged that the experimental and numerical methodologies still used in the automotive field are not suitable for exhaustively evaluating the offensiveness of the SAPR (Remote Pilot Aircraft Systems).
The aim of the S-APR 2 project is to define the characteristics of a laboratory, both experimental and numerical, used to evaluate the offense of the SAPR, with a maximum take-off mass of less than 25 kg. The laboratory can only be defined following an in-depth analysis of the evolution of the EASA (European Aviation Safety Agency) and FAA (Federal Aviation Administration) regulations, which are still in force or are being published on the subject of "safety" of the SAPR. The research project also aims to define what should be the design features that a SAPR must possess to be considered harmless and which changes the end user must make to make the SAPR having offensive characteristics, already in its endowment, an aircraft harmless. [CLOSED]
Click here to read more!
S-APR
The main purpose of the research project S-APR is to determine which features can make the impact of a SAPR for people "non-lethal". The lack of guidelines for the certification of the offensive (dangerousness) of the remotely piloted aircraft systems makes it practically impossible to certify these vehicles in a deterministic way for flight operations in mixed or critical scenarios, and above all near sensitive structures (airports, railways, highways, gatherings, events, ...), both at Italian and European level. [CLOSED]
Click here to read more!
SMILE
The purpose of the SMILE project (SisteMa a pIlotaggio remoto per il supporto all'agricoLtura di precisione) is the development of an automatic reconnaissance system based on Remotely Piloted Aircraft (APR), as support for precision farming methods of interest for farmers and agronomists. The development of this research program involves the design interaction of three fundamental factors:
- the flight system
- the measurement system
- end users
The flight system includes a flight segment and a ground segment for remote control of the system. The flight segment is an APR, known more familiarly as drone. [CLOSED]
Click here to read more!